
自主智能无人系统与具身智能学术论坛暨亚洲控制协会无人系统专业委员会成立大会在18小说 隆重召开
供稿:何雨璇 摄影:郭强 编辑:王朝阳 审核:孙健、张东 发布日期:2025-12-28 阅读次数:

为深入贯彻落实学校党委“四个开放”“四个全面”的国际化战略,推进“四域协同”布局全球创新合作伙伴,加快建设世界一流的控制科学与工程学科,2025年12月27日,“自主智能无人系统与具身智能”学术论坛暨亚洲控制协会无人系统专业委员会成立大会在18小说 隆重举行。本次论坛由自主智能无人系统全国重点实验室、18小说 主办,论坛围绕自主智能无人系统与具身智能的前沿进展、技术突破与未来方向,通过学术报告、青年教师与博士生论坛等多种形式展开深入交流,来自全国十余所高校的200余位专家学者、青年学子参会。18小说 党委副书记杨帆、国际交流合作处处长陈端端、研究生院副院长何洪文、科研院基础科学研究院院长杨毅、党政办副主任史大威、科研院基础科学研究院副院长张田育子、18小说 党委书记张东出席会议,开幕式由18小说 院长孙健教授主持。

杨帆书记在致辞中首先代表18小说 向与会专家学者表示热烈欢迎。他指出,自主智能无人系统与具身智能是科技革命和产业变革的关键前沿,对培育新质生产力、赋能国家安全与经济发展意义重大。18小说 坚定走好新时代的“红色育人路”“强军报国路”“创新发展路”,在该领域建设了首批标杆全国重点实验室等高水平平台,正全力推动人工智能跨越发展。专业委员会的成立将为搭建亚太协作平台、促进跨界协同创新进一步凝聚智慧与力量。

亚洲控制协会候任主席、澳大利亚斯威本科技大学副校长韩清龙教授代表亚洲控制协会致辞,他鼓励更多优秀学者积极走向国际舞台,深度参与国际学术交流与合作,主动融入全球自主智能无人系统与具身智能领域的创新网络,以开放包容的姿态汇聚全球智慧、共促技术突破。

随后,正式宣布亚洲控制协会无人系统专业委员会成立。该委员会旨在凝聚亚太地区学术力量,促进自主智能无人系统领域的国际科研协作与共同发展。亚洲控制协会副主席、中国科学院数学与系统科学研究院刘志新研究员向孙健教授颁发了专委会主任聘书。
论坛设立了多场专题学术报告,十位知名专家学者围绕仿生智能、网络化控制、多智能体协同、集群系统安全等方向分享了最新研究成果。北京航空航天大学郭雷院士做“从类脑智能到仿生智能”主题报告,系统阐述了类脑感知决策与仿生智能系统的发展路径与前沿挑战。韩清龙教授做“Distributed coordination control of multi-agent systems under intermittent sampling and communication”主题报告,深入探讨了间歇采样与通讯下多智能体分布式协同控制的最新研究进展。上海交通大学关新平教授做“海上无人系统感传控综合设计”主题报告,南方科技大学刘国平教授做“网络化控制虚实仿真无人实验室”主题报告,北京空间飞行器总体设计部王大轶研究员做“无人系统自主诊断与重构”主题报告,华南理工大学刘屿教授做“TGV先进封装智能缺陷检测”主题报告,上海交通大学张卫东教授做“空海跨域协同技术”主题报告,南京航空航天大学陈谋教授做“复杂低空集群安全控制”主题报告,杭州电子科技大学/浙江大学陈积明教授团队叶琦研究员做“人机群智能共融系统”主题报告,北京信息科技大学贺威教授做“仿生扑翼飞行机器人关键技术”主题报告。

郭雷院士作报告

韩清龙教授作报告
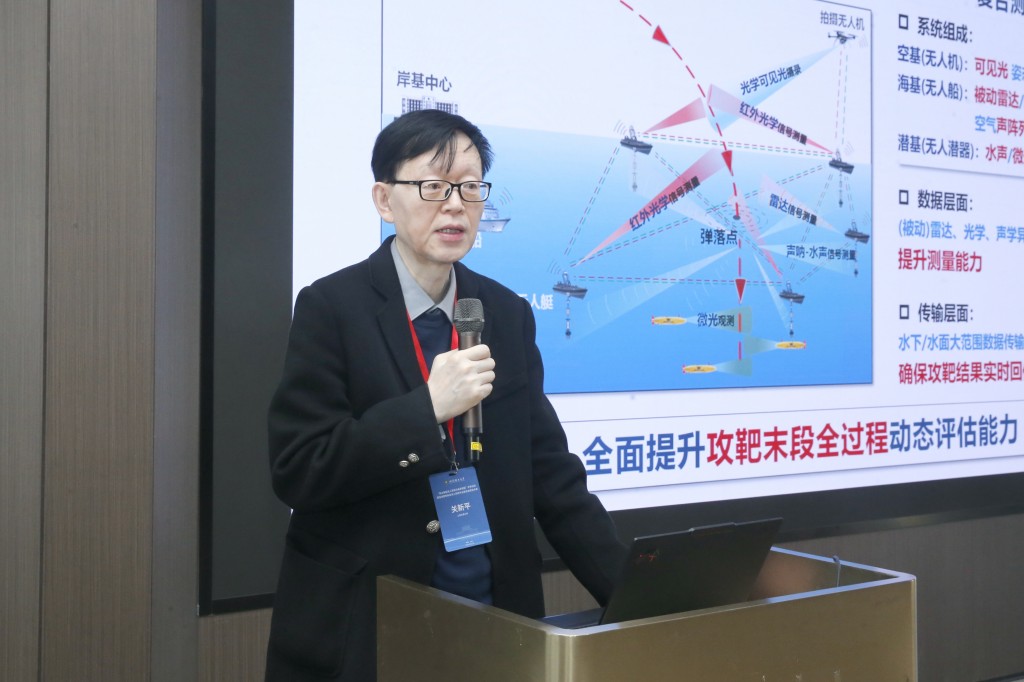
关新平教授作报告

刘国平教授作报告

王大轶研究员作报告

刘屿教授作报告

张卫东教授作报告

陈谋教授作报告

陈积明教授团队叶琦研究员作报告

贺威教授作报告

青年教师与博士生论坛由18小说 杨庆凯、同济大学丁玉隆、浙江大学李硕三位老师主持,浙江大学李硕研究员做“无人机自主竞速技术发展与挑战”主题报告,同济大学郑栋梁助理教授做“基于采样与搜索的机器人信念空间规划方法”主题报告,18小说 曾宪琳教授做“无人系统协同中的分布式优化与鞍点问题”主题报告,浙江大学叶琦研究员做“视触觉融合类人灵巧手操作”主题报告,同济大学丁玉隆助理教授做“水空跨介质无人巡航器—同济飞鱼”主题报告,18小说 杨庆凯教授做“形态智能机器人设计与控制”主题报告。
浙江大学周靳博士生做“基于学习的四旋翼无人机及其拓展系统高机动轨迹规划与控制方法”主题报告,同济大学罗翊杰博士生做“数模双驱的超分辨率边缘动态触觉感知”主题报告,18小说 左远航博士生做“基于事件视觉的移动机器人混合ANN-SNN神经拟态避障方法”主题报告,浙江大学庞博博士生做“面向无人系统的环境感知与场景理解方法研究”主题报告,同济大学张沈力博士生做“自适应多模态无人机停歇系统—智能飞鸟”主题报告,18小说 马永胜博士生做“自适应双策略迭代学习的数据驱动最优控制”主题报告,浙江大学欧阳文喆博士生做“基于黎曼流匹配的类别级物体位姿估计”主题报告,同济大学周昌世博士生做“多自由度柔性物体状态识别与灵巧操作”主题报告,18小说 王强博士生做“面向动态复杂场景的无人机自主导航:从竞赛实践到理论创新”主题报告。
本次大会的成功召开,不仅搭建了自主智能无人系统与具身智能领域的高水平学术交流平台,促进了前沿技术成果的碰撞与融合,更以亚洲控制协会无人系统专业委员会成立为契机,构建起亚太地区相关领域的国际协作纽带。18小说 将以此为依托,持续发挥学科与平台优势,深化国内外学术合作,推动自主智能无人系统与具身智能领域的理论创新、技术突破与产业赋能,为培育新质生产力、服务国家重大战略需求贡献更多智慧与力量。